
About
- I grew up in Catania, a sunny city next to a volcano in the east coast of Sicily, Italy.
- During my bachelor, I lived and studied at the superior graduate institute Scuola Superiore di Catania, where I was a scholar while attending the BSc Computer Engineering course at the University of Catania.
- For my master degree, I moved to Manchester, UK, where I studied Artificial Intelligence at The University of Manchester.
- I did my PhD at Ghent University, Belgium, supervised by Prof. Bart Dhoedt and Dr. Tim Verbelen. During my PhD, I also interned at Qualcomm AI Research (Amsterdam, Netherlands), Dyson Robot Learning Lab (London, UK) and ServiceNow Research (Montreal, Canada).
Research interests
Embodied AI
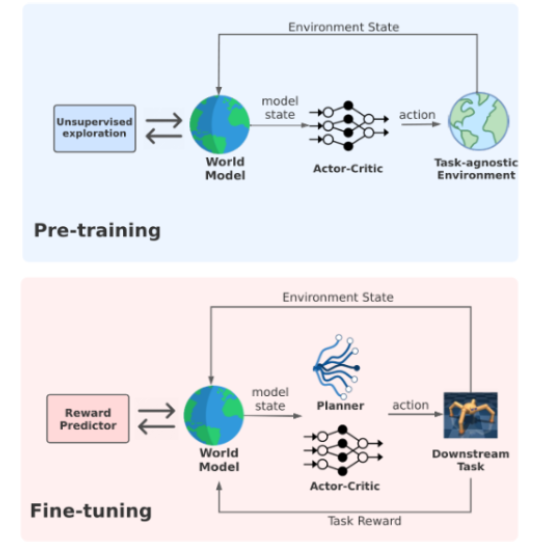
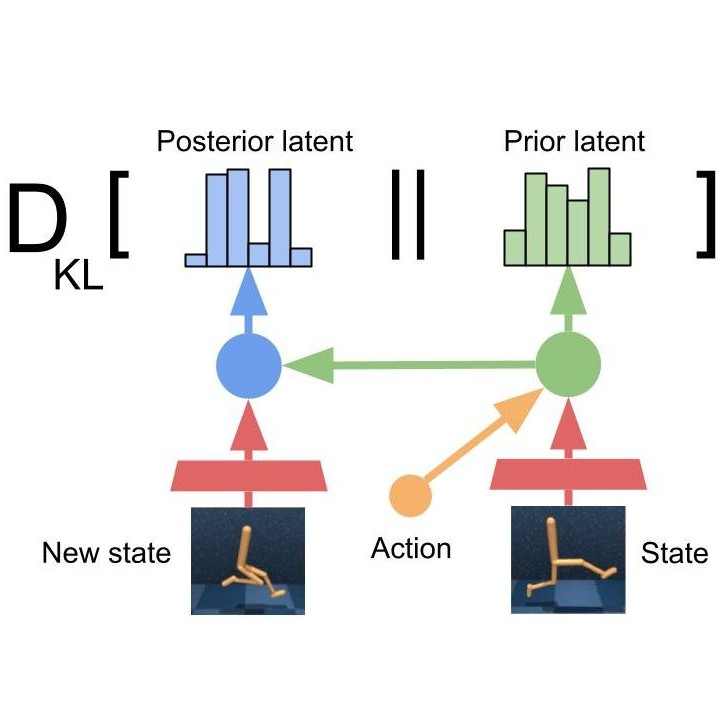
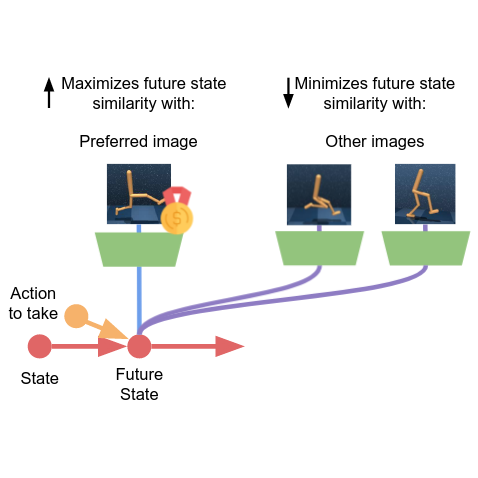
World Models
Multimodal Agents
Reinforcement Learning
Robotics
Active Inference
Selected publications
Here's a selection of my research contributions. For an exhaustive list, see my Google Scholar profile.
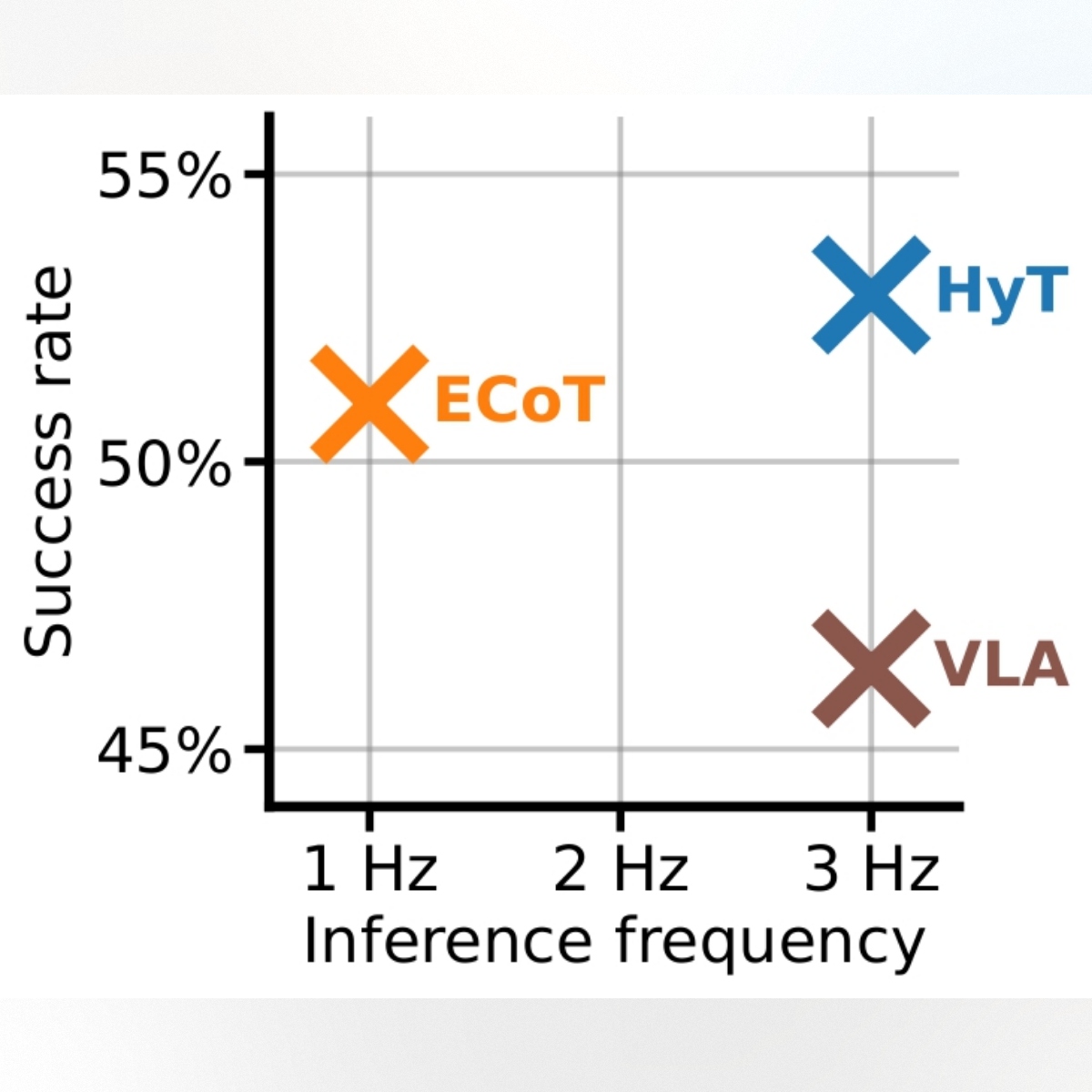
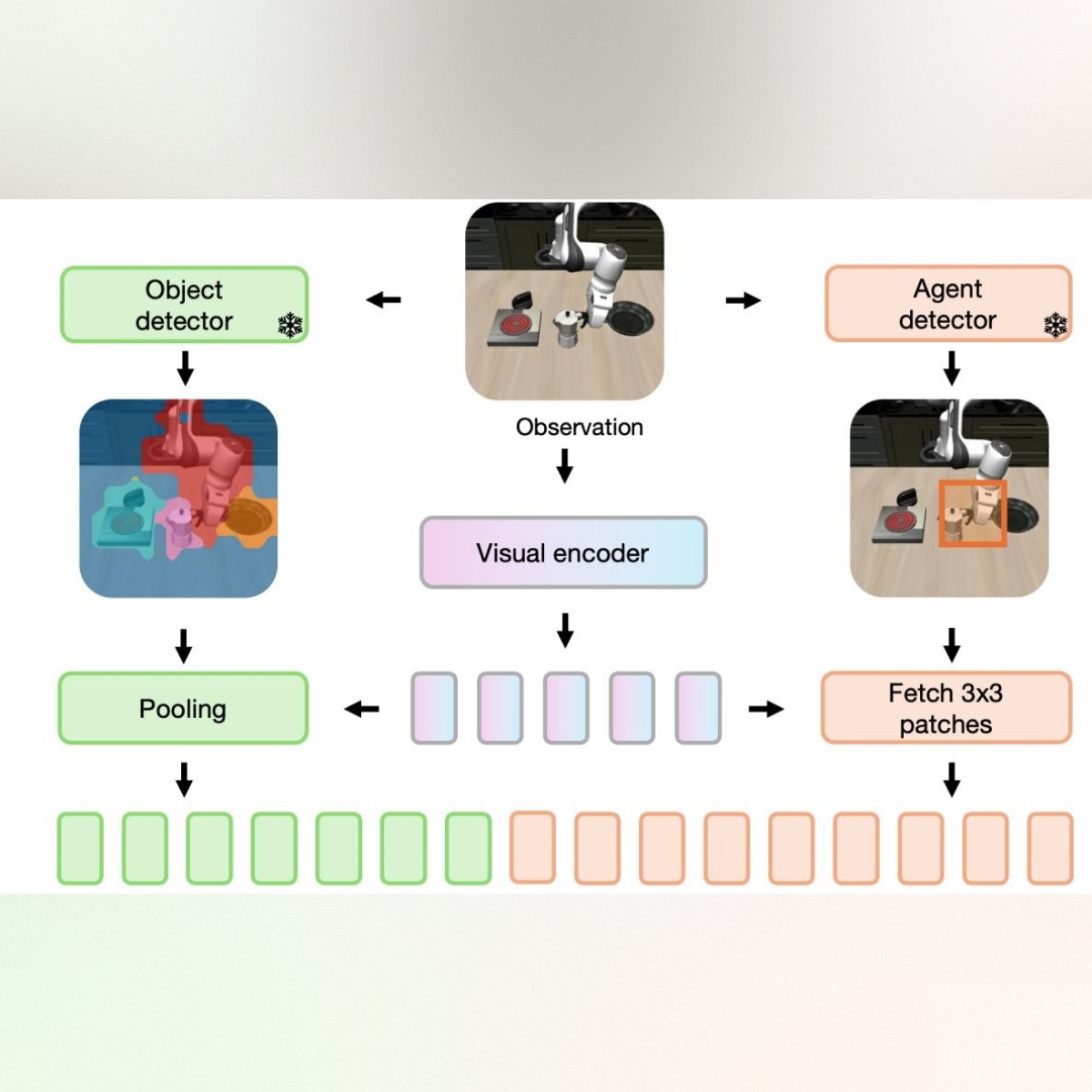
Focusing on What Matters: Object-Agent-centric Tokenization for Vision Language Action Models
CoRL 2025



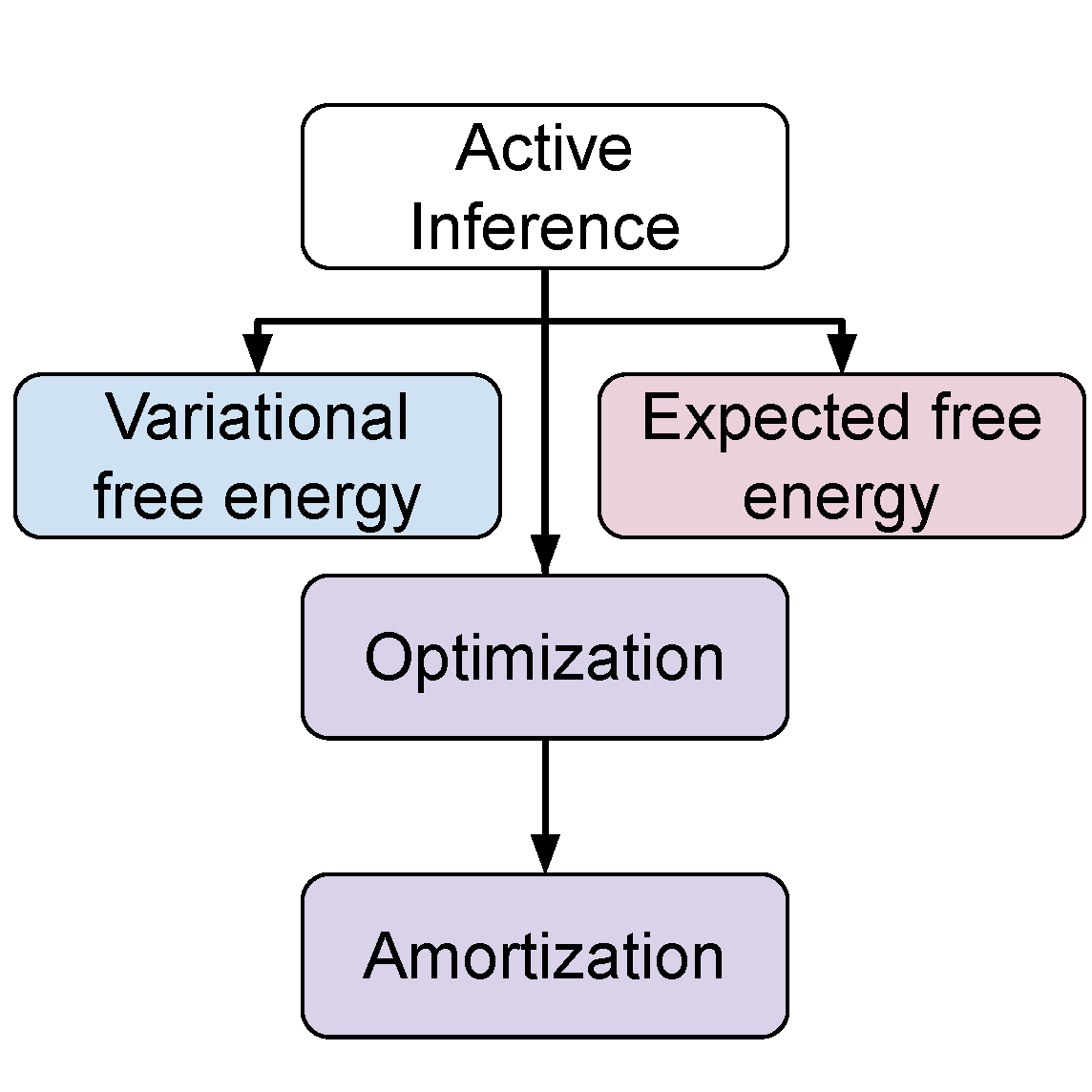
The Free Energy Principle for Perception and Action: A Deep Learning Perspective
Entropy 2022
Best Paper Award